
The Argos
By Tristan Greiner, Justin hui, Andrew Vickory
Design summary:
Most of our mechanism can be broken down into three parts: The base, the primary arm and the servo assembly. The base holds the primary arm which goes through the obstacle and supports the load placed on the servo assembly. The servo assembly keeps the motor in the correct location for proper lifting of the weight.
Design details:
The base is a basic box frame with cross bracing. It's large so that it can take varied loads without excessive deformation. The primary arm is made up of two T beams which are cross braced together to avoid both bending and torsion to a certain extent, though the placing of the motor makes little resistance to torsion necessary. This arm is held up and pulled slightly to the left by the very long support arms. These support arms are pre-stressed to anticipate the load applied by the weight and hence offset a certain amount of the strain on the long arm. Their position ungainly seeming appearance is meant to guarantee the most vertical support possible as far away from the base as possible. Deformation in these arms is acceptable since the angle is closer to vertical the more they deform and so actually applies more upward force as greater stress is applied. This is amplified by the pre-stressing of the arms.

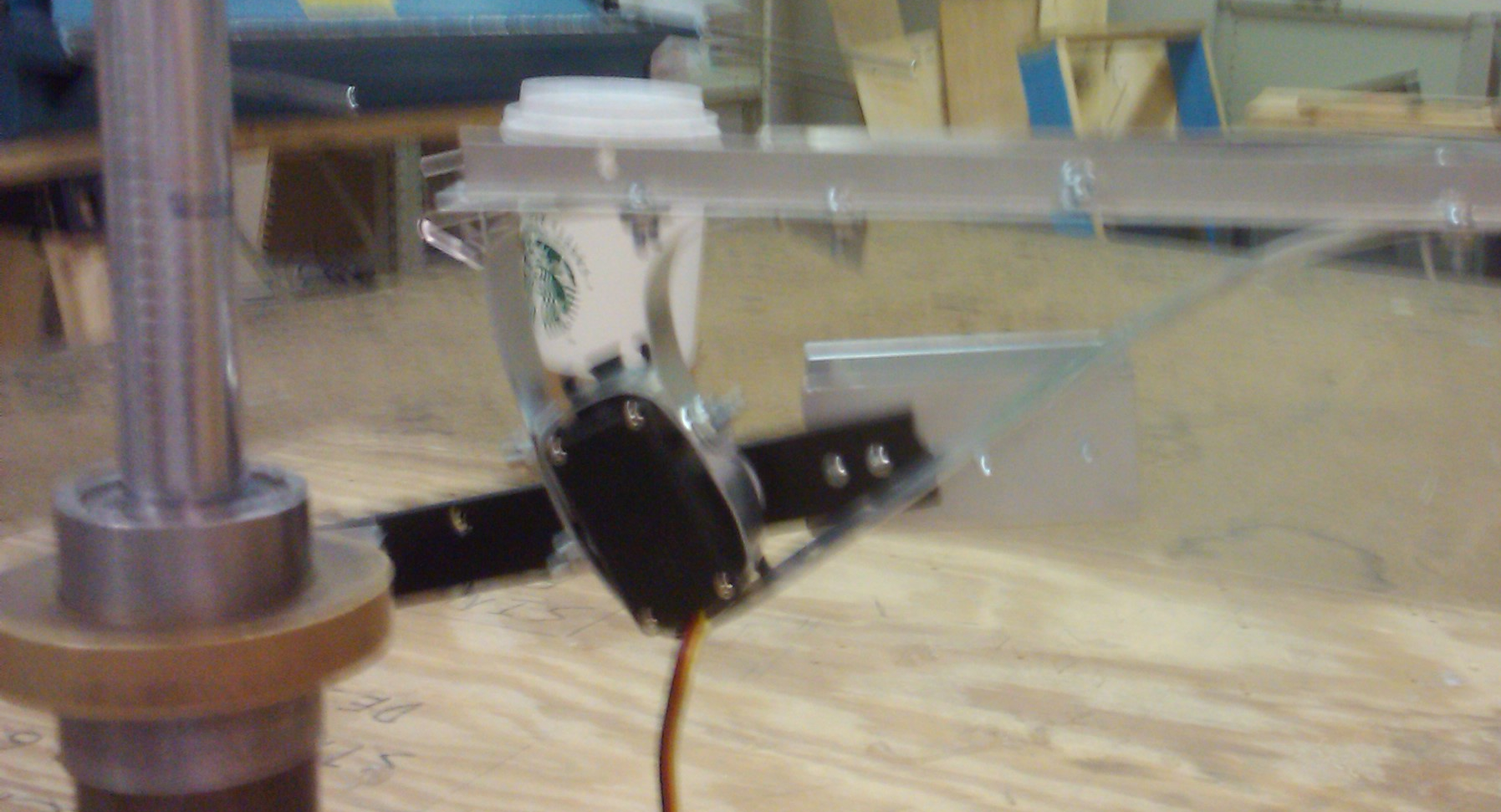
Our servo assembly has several features that allow it to function well. The first is the connection between servo and primary arm. We used curved strips that cause the moment on the motor to be supported by axial deformation of the strips. This means that when a load is placed on the motor, the rotation is only in the arm attached to the motor and not in the motor itself. The motor is positioned so that it is attached to the lowest point of the bottom strip, meaning it can't move any further down without considerable axial deformation of the bottom strip. The arm of the motor has a small piece of aluminum attached to one end to hook the weight when lifting. On the opposite end of the arm is a counterweight allowing for just enough torque to life the weight exactly two inches (found empirically in order to accurately account for deformation).
Technical analysis of the servo's torque output:
Assume maximum torque is reached at arm being horizontal.
weight of basket for holding weight : .6 oz.
Weight being lifted : 16 oz.
W = 16 oz. + .6 oz. = 16.6 oz.
Lever arm = L1 = 3.375 in.
moment caused = M1
Max M1 = 16.6 oz. X 3.375 in. = 56 oz.-in.
Counter weight : 1.8 oz.
Lever arm = L2 = 1.25 in.
moment caused = M2
Max M2 = 1.8 oz. X 1.25 in. = 2.25 oz.-in.
max torque output = M1 – M2 = 53.75 oz.-in.
Max torque/servo capacity = 53.75
oz.-in./72 oz-in. = .75
List of original features:
unique approach to holding the motor in place using curved strips
visually appealing and functional auxiliary support for the primary arm
Exact conformation to the total weight and lifting specifications