
No Longer Maintained
This is my old personal website.
As of 2018 it is no longer maintained.
It now acts as archive of my earlier articles, videos, photos and other supporting materials,
some of which are otherwise difficult to find.
For my latest work, please visit my new lab website:
Stanford Biomechatronics Laboratory.
Related Sites
Laboratory: Experimental Biomechatronics Lab
Courses: 24-370 Design I - 24-674 Biomechatronics - design topic readings
Seminar: CMU Bipedal Locomotion Seminar
Conference: Dynamic Walking 2013, Pittsburgh
Selected Publications
Zhang, J., Fiers, P., Witte, K. A., Jackson, R. W., Poggensee, K. L., Atkeson, C. G., Collins, S. H. (2017) Human-in-the-loop optimization of exoskeleton assistance during walking. Science, 356:1280-1284.
Diller, S., Majidi, C., Collins, S. H. (2016) A lightweight, low-power electroadhesive clutch and spring for exoskeleton actuation. In Proceedings ICRA, pages 682-689.
Collins, S. H., Wiggin, M. B., Sawicki, G. S. (2015) Reducing the energy cost of human walking using an unpowered exoskeleton. Nature, 522:212-215.
Caputo, J. M., Collins, S. H. (2014) A universal ankle-foot prosthesis emulator for human locomotion experiments. J. Biomechanical Engineering, 136:035002.
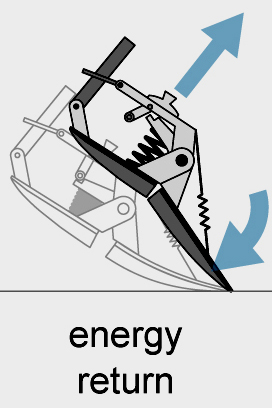
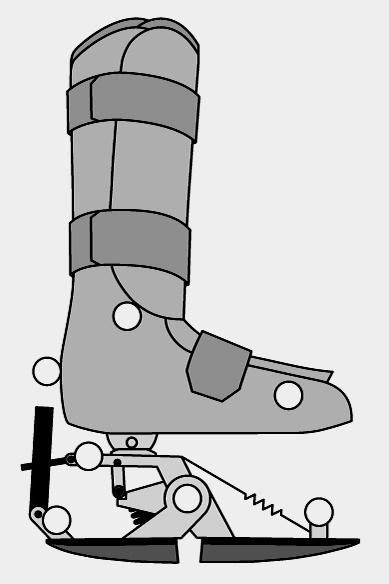
Collins, S. H., Kuo, A. D. (2010) Recycling energy to restore impaired ankle function during human walking. Public Library of Science ONE, 5:e9307.
Collins, S. H., Adamczyk, P. G., Kuo, A. D. (2009) Dynamic arm swinging in human walking. Proceedings of the Royal Society of London B., 276:3679-3688.
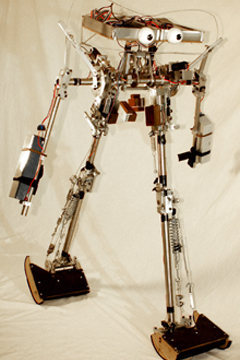
Collins, S. H., Ruina, A. L., Tedrake, R., Wisse, M. (2005) Efficient bipedal robots based on passive-dynamic walkers. Science, 307:1082-1085.
Collins, S. H., Wisse, M., Ruina, A. (2001) A three-dimensional passive-dynamic walking robot with two legs and knees. Int. J. Robotics Research, 20:607-615.
Other Publications
Diller, S. B., Collins, S. H., Majidi, C. (2018) The effects of electroadhesive clutch design parameters on performance characteristics. Journal of Intelligent Material Systems and Structures, in press.
Kim, M., Chen, T., Chen, T., Collins, S. H. (2018) An ankle-foot prosthesis emulator with control of plantarflexion and inversion-eversion torque. Trans. Robotics, 34:1183-1194.
Witte, K. A., Fatschel, A. M., Collins, S. H. (2017) Design of a lightweight, tethered, torque-controlled knee exoskeleton. In Proceedings IEEE International Conference on Rehabilitation Robotics, pages 1646-1653.
Jackson, R. W., Dembia, C. L., Delp, S. L., Collins, S. H. (2017) Muscle-tendon mechanics explain unexpected effects of exoskeleton assistance on metabolic rate during walking. Journal of Experimental Biology, 220:2082-2095.
Zhang, J., Collins, S. H. (2017) The passive series stiffness that optimizes torque tracking for a lower-limb exoskeleton in human walking. Frontiers in Neurorobotics, 11:68.
Steele, K. M., Jackson, R. W., Shuman, B., Collins, S. H. (2017) Muscle recruitment and coordination with an ankle exoskeleton. Journal of Biomechanics, 59:50-58.
Kim, M., Collins, S. H. (2017) Step-to-step ankle inversion/eversion torque modulation can reduce effort associated with balance. Frontiers in Neurorobotics, 11:62.
Galle, S., Malcolm, P., Collins, S. H., De Clercq, D. (2017) Reducing the metabolic cost of walking with an ankle exoskeleton: interaction between actuation timing and power. Journal of NeuroEngineering and Rehabilitation, 14:35.
Zhang, J., Cheah, C. C., and Collins, S. H. (2017) Torque control in legged locomotion. In Bio-Inspired Legged Locomotion: Concepts, Control and Implementation, eds. M. Sharbafi, A. Seyfarth, Elsevier, Chapter 5, pages: 347-395.
Kim, M., Collins, S. H. (2017) Once-per-step control of ankle push-off work improves balance in a three-dimensional simulation of bipedal walking. Transactions on Robotics, 33:406-418.
Quesada, R. E., Caputo J. M., Collins, S.H. (2016) Increasing ankle push-off work with a powered prosthesis does not necessarily reduce metabolic rate for transtibial amputees. Journal of Biomechanics, 49:3452-3459.
Jackson, R. W., Collins, S. H. (2015) An experimental comparison of the relative benefits of work and torque assistance in ankle exoskeletons. J. Applied Physiology, 119:541-557.
Kim, M., Collins, S. H. (2015) Once-per-step control of ankle-foot prosthesis push-off work reduces effort associated with balance during human walking. Journal of NeuroEngineering and Rehabilitation, 12:43.
Malcolm, P., Quesada, R. E., Caputo, J. M., Collins, S. H. (2015) The influence of push-off timing in a robotic ankle-foot prosthesis on the energetics and mechanics of walking. Journal of NeuroEngineering and Rehabilitation, 12:21.
Caputo, J. M., Adamczyk, P. G., Collins, S. H. (2015) Informing ankle-foot prosthesis prescription through haptic emulation of candidate devices. In Proceedings IEEE International Conference on Robotics and Automation, pages 6445-6450.
Collins, S. H., Kim, M., Chen, T., Chen, T. (2015) An ankle-foot prosthesis emulator with control of plantarflexion and inversion-eversion torque. In Proceedings IEEE International Conference on Robotics and Automation, pages 1210-1216. Best Medical Robotics Paper.
Witte, K. A., Zhang, J., Jackson, R. W., Collins, S.H. (2015) Design of two lightweight, high-bandwidth torque-controlled ankle exoskeletons. In Proceedings IEEE International Conference on Robotics and Automation, pages 1223-1228.
Zhang, J., Cheah, C., C., Collins, S.H. (2015) Experimental comparison of torque control methods on an ankle exoskeleton during human walking. In Proceedings IEEE International Conference on Robotics and Automation, pages 5584-5589. PDF
Caputo, J. M., Collins, S. H. (2014) Prosthetic ankle push-off work reduces metabolic rate but not collision work in non-amputee walking. Nature Scientific Reports, 4:7213.
Collins, S. H., Caputo, J. M., Adamczyk, P. G. (2014) Emulating prosthetic feet during the prescription process to improve outcomes and justifications. In Proc. IEEE Workshop on Advanced Robotics and its Social Impacts, 2 pages. PDF
Collins, S. H., Jackson, R. W. (2013) Inducing self-selected human engagement in robotic locomotion training. In Proceedings International Conference on Rehabilitation Robotics, 6 pages. PDF
Kim, M., Collins, S. H. (2013) Stabilization of a three-dimensional limit cycle walking model through step-to-step ankle control. In Proceedings International Conference on Rehabilitation Robotics, 6 pages. PDF
Caputo, J. M., Collins, S. H. (2013) An experimental robotic testbed for accelerated development of ankle prostheses. In Proceedings International Conference on Robotics and Automation, pages 2630-2635.
Zhang, J., Cheah, C. C., Collins, S. H. (2013) Stable human-robot interaction control for upper-limb rehabilitation robotics. In Proceedings International Conference on Robotics and Automation, pages 2201-2206. PDF
Song, S., LaMontagna, C., Collins, S. H., Geyer, H. (2013) The effect of foot compliance encoded in the windlass mechanism on the energetics of human walking. In Proceedings International Conference of the Engineering in Medicine and Biology Society , pages 3179-3182. PDF
Collins, S. H. (2013) What do walking humans want from mechatronics? In Proceedings International Conference on Mechatronics, pages 24-27. PDF
Collins. S. H., Kuo, A. D. (2013) Two independent contributions to step variability during over-ground human walking. Public Library of Science ONE, 8:e73597.
Wiggin, M. B, Sawicki, G. S., and Collins. S. H. (2011) An exoskeleton using controlled energy storage and release to aid ankle propulsion. In Proceedings of the International Conference on Rehabilitation Robotics, pages 1-5. PDF
Zelik, K. E., Collins. S. H., Adamczyk, P. G., Segal, A. D., Klute, G. K., Morgenroth, D. C., Hahn, M. E., Orendurff, M. S., Czerniecki, J. M., Kuo, A. D. (2011) Systematic variation of prosthetic foot parameter affects center-of-mass mechanics and metabolic cost during walking. IEEE Transactions on Neural Systems and Rehabilitation Engineering 19:411-419. PDF
Segal, A. D., Zelik, K. E., Klute, G. K., Morgenroth, D. C., Hahn, M. E., Orendurff, M. S., Adamczyk, P. G., Collins, S. H., Kuo, A. D., Czerniecki, J. M. (2011) The effects of a controlled energy storage and return prototype prosthetic foot on transtibial amputee ambulation. Human Movement Science, 31:918-931. PDF
Morgenroth, D. C., Segal, A. D., Zelik, K. E., Czerniecki, M. J., Klute, G. K., Adamczyk, P. G., Orendurff, M. S., Hahn, M. E., Collins, S. H., Kuo, A. D. (2011) The effect of prosthetic foot push-off on mechanical loading associated with knee osteoarthritis in lower extremity amputees. Gait & Posture, 34:502-507. PDF
Bregman, D. J., van der Krogt, M. M., de Groot, V., Harlaar, J., Wisse, M., Collins, S. H. (2011) The effect of ankle foot orthosis stiffness on the energy cost of walking: a simulation study. Clinical Biomechanics, 26:955-961. PDF
van der Krogt, M. M., Bregman, D. J. J., Wisse, M., Doorenbosch, C. A. M., Harlaar, J., Collins, S. H. (2010) How crouch gait can dynamically induce stiff-knee gait. Annals of Biomedical Engineering, 38:1593-1606. PDF
Collins, S. H., Adamczyk, P. G., Ferris, D. P., Kuo, A. D. (2009) A simple method for calibrating force plates and force treadmills using an instrumented pole. Gait & Posture, 29:59-64.
Vanderpool, M. T., Collins, S. H., Kuo, A. D. (2008) Ankle fixation need not increase the energetic cost of human walking. Gait & Posture, 28:427-433. PDF
Adamczyk, P. G., Collins, S. H., Kuo, A. D. (2006) The advantages of a rolling foot in human walking. Journal of Experimental Biology, 209:3953-3963. PDF
Collins, S. H., Ruina, A. (2005) A bipedal walking robot with efficient and human-like gait. In Proc. IEEE International Conference on Robotics & Automation, pages 1983-1988.
Pratt, J. E., Krupp, B. T., Morse, C. J., Collins, S. H. (2004) The RoboKnee: an exoskeleton for enhancing strength and endurance during walking. In Proc. IEEE International Conference on Robotics and Automation, pages 2430-2435.
Curriculum Vitae
PDF - last updated March 2018
Movie and Image Links (no longer maintained)
Prosthesis Emulator



Energy-Recycling Foot

Arm Swinging



Walking Robot


Passive Robot



Other Movies


