Matthew Z Huber | Design Thinking
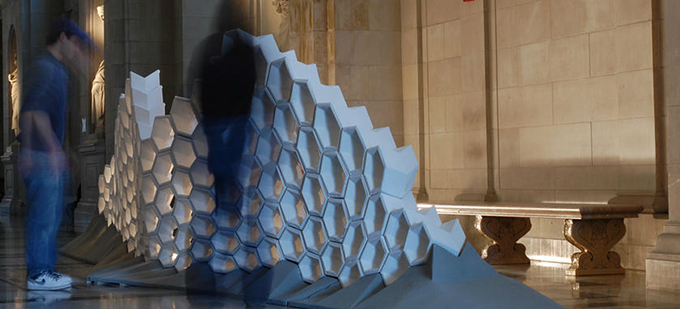
Pinch Wall
Date: Fall 2010
The project was completed in collaboration with Nelly Dacic, Jared Friedman, Christopher Gallot, Puja Patel, Craig Rosman, and Giacomo Tinari for a seminar on digital fabrication at Carnegie Mellon University, taught by Professor Jeremy Ficca.
The course investigated techniques in robotic fabrication, with particular emphasis on "mass customization." The project looks at the capacity of robotic milling to revive complex stereotomic forms, once common practice in masonry construction. The pinch wall was designed using parametric variables to generate “swarfing” paths for a 7-axis industrial robot. These milling paths were used to cut 300 unique foam molds from which plaster blocks were cast and eventually assembled.
The design investigated mass customized components in aggregation to form a variable system that can performatively respond through parameters such as porosity, thickness, aperture size, and distortion, in order to manipulate views, shading, etc. The components interlock to form a structural masonry unit that could be incorporated into real life construction assembly systems.
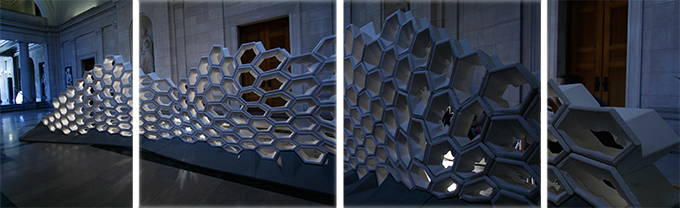
Images of Final Installation:
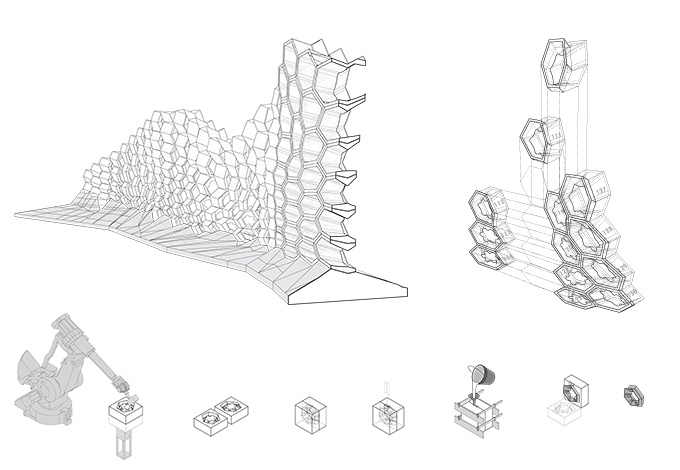
Assembly and Production Drawings:
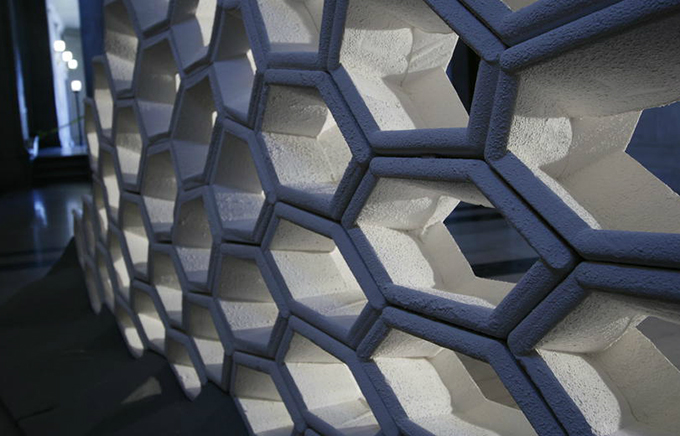
Prototype and Process Photos:
