- Definition & Manipultion:
- Definition
- 01
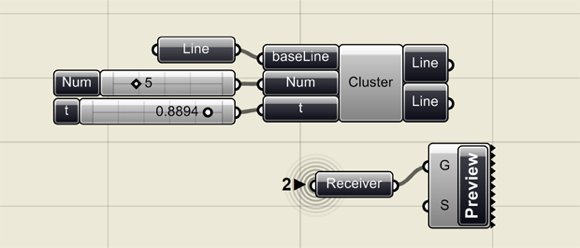
Tran_Arm Definition download .ghx
In this model, lines model the scissor arm rigid bodies. All lines are of the same length. The anchor comprises a fixed line in space and one of its
endpoints.
The next step is to define the anchor. There are several parts available to be used as the anchor - the start point or the endpoint of frames. This series of points slide on both X and Y directions, anchoring a middle line path between the two controlling points and a changeable distance between each other.
Since all the frames are of the same length, after calculating the first anchor point, it is easy to locate all the rest anchors. Finally, you apply
crossing frames on each anchor points and get the extendible frames.
... more on Design Patterns CA
Tran_Arm Manipulations